Thông thường, trạm trái đất phát tín hiệu uplink lên một M Okvip1 store địa tĩnh, một M Okvip1 store địa tĩnh khác có thể thu được tín hiệu này do búp sóng rộng của Anten trạm trái đất. Tín hiệu ngoài mong muốn này có thể gây nhiễu đối với các M Okvip1 store lân cận, làm ảnh hưởng đến lưu lượng đường truyền. Trong thông tin M Okvip1 store, Phương pháp kết hợp TDOA/FDOA được sử dụng xác định vị trí nguồn nhiễu này.
1. Phương pháp FDOA/TDOA sử dụng 02 M Okvip1 store GSO
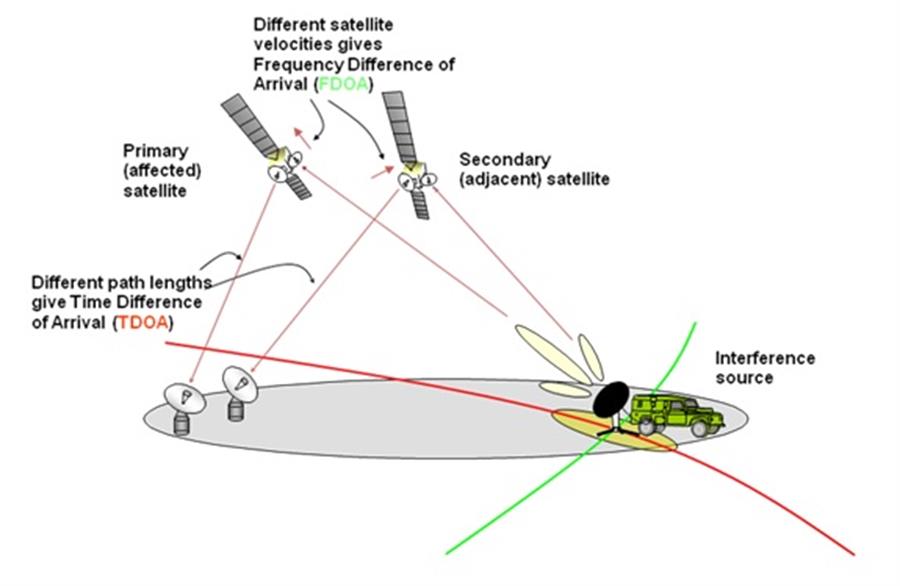
Hình 1: Xác định vị trí nguồn nhiễu trong thông tin M Okvip1 store sử dụng phương pháp TDOA/FDOA
Đây là phương pháp sử dụng hai M Okvip1 store địa tĩnh cùng với hệ thống trạm mặt đất đo độ lệch thời gian (TDOA) và độ lệch Okvip88 - liên minh giải trí tới (FDOA) của các thành phần tín hiệu, kết hợp giữa hai phép đo này được đường giao nhau giữa hai thành phần từ đó có thể ước lượng được vị trí nguồn nhiễu.
Hai chuỗi thời gian của tín hiệu đường xuống truyền từ hai M Okvip1 store địa tĩnh sẽ được lưu và phân tích để biết được độ lệch thời gian và Okvip88 - liên minh giải trí giữa hai M Okvip1 store, điều này được thực hiện bằng phương pháp CAF (Cross Ambiguity Function). Giá trị của CAF cho biết được độ lệch Okvip88 - liên minh giải trí và thời gian khác nhau là sự tương quan chéo của hai tín hiệu thu được và được biểu diễn bởi phương trình:
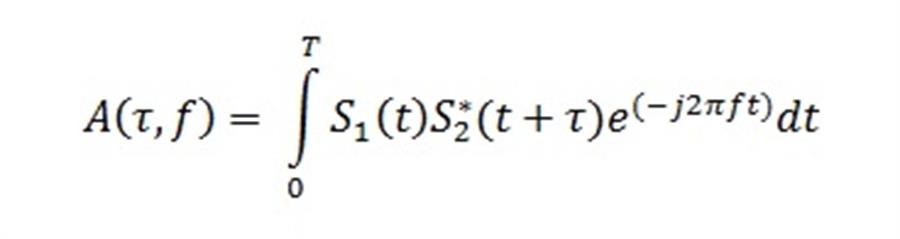
Trong đó:
- S1 tín hiệu được thu từ M Okvip1 store 1
- S2 tín hiệu được thu từ M Okvip1 store 2
- τ: Các tham số về độ trễ thời gian thu được
- f: Các tham số về dịch Okvip88 - liên minh giải trí thu được
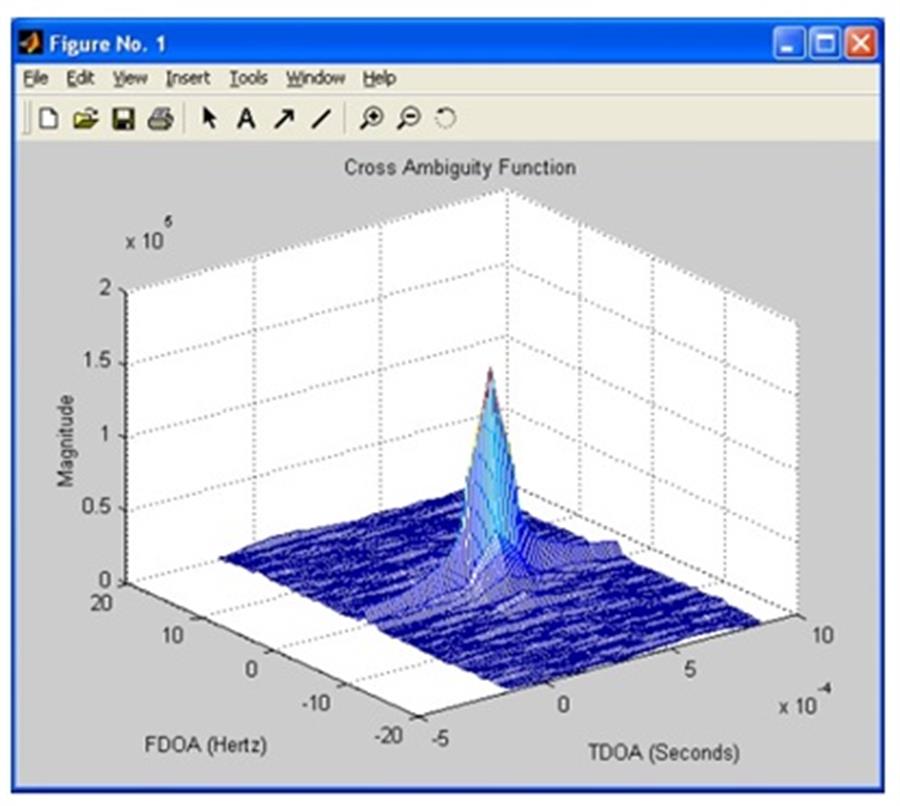
Hình 2: CAF được mô phỏng bằng phần mềm Matlab
Mỗi điểm trong mặt phẳng CAF đại diện cho tương quan độ lớn tại thời gian và độ dịch Okvip88 - liên minh giải trí. Mức độ cao nhất của mối tương quan xảy ra khi các thành phần tín hiệu thống nhất được xác định chính xác cả thời gian và Okvip88 - liên minh giải trí. Các giá trị của thời gian và độ dịch Okvip88 - liên minh giải trí sẽ được tính toán và đánh giá tín hiệu TDOA và FDOA. Do đó CAF là một mặt phẳng ba chiều với các tọa độ của TDOA, FDOA và độ lớn, các điểm đỉnh trong mặt phẳng là kết quả của sự tương quan của tín hiệu.
2. Các điều kiện để xác định vị trí nguồn nhiễu thành công
Phương pháp xác định vị trí nguồn nhiễu sử dụng phương pháp TDOA/FDOA được miêu tả ở trên được thực hiện cùng một số điều kiện nhất định như:
- Phải có hai M Okvip1 store GSO lân cận hoạt động cùng Okvip - hôm nay 1 tỷ số, cùng vùng phủ sóng.
- Biết chính xác vị trí của hai M Okvip1 store được lựa chọn liên quan đến các phép đo.
- Khoảng cách tối đa giữa hai M Okvip1 store là từ 10 độ đến 12 độ đối với băng C, từ 8 độ đến 9 độ đối với băng Ku, từ 5 độ đến 6 độ đối với các M Okvip1 store sử dụng nghiệp vụ BSS. Khoảng cách tối thiểu giữ hai M Okvip1 store là 1,5 độ. Ngày nay các M Okvip1 store GSO được sử dụng rộng rãi và phổ biến do đó dễ dàng lựa chọn hai M Okvip1 store thích hợp.
- Thời gian trễ khác nhau thông qua hai đường tín hiệu nên nhỏ hơn 1/f (f là Okvip88 - liên minh giải trí của tín hiệu) để xác định vị trí máy phát chưa biết.
- TDOA có thể được đo thành công đối với những tín hiệu được điều chế bằng cách đo độ trễ thời gian khác nhau của những thành phần tín hiệu dạng sóng khác nhau. Nhưng TDOA thực hiện đo đối với những tín hiệu CW là rất khó khăn.
- Việc đo FDOA đòi hỏi dữ liệu thiên văn M Okvip1 store chính xác tại thời điểm đo lường. Nếu M Okvip1 store lân cận được sử dụng cho TDOA và FDOA đo là một M Okvip1 store quỹ đạo nghiêng, các kiến thức về thiên văn là rất quan trọng. Nếu không, lỗi vị trí RMS (từ các giá trị đo được của TDOA và FDOA) có thể có xu hướng đến vô cùng hai lần mỗi ngày. Nếu hai M Okvip1 store liền kề không thuộc về cùng một đơn vị điều hành khai thác thì rất khó để lấy dữ liệu thiên văn M Okvip1 store chính xác.
- Các tín hiệu từ hai đường phải được tương quan cùng với thời gian khác nhau và độ lệch Okvip88 - liên minh giải trí cho đến khi một đáp tuyến đỉnh trong mối tương quan công suất thu được. Nếu sự tương quan không xảy ra thì tín hiệu có thể phải được tổng hợp từ miền Okvip88 - liên minh giải trí tới miền thời gian, đó là vấn đề khó khăn hơn rất nhiều.
- Phép đo TDOA và FDOA phải được đo nhiều lần khác nhau và trong nhiều giờ để có được kết quả vị trí của nguồn nhiễu tốt nhất.
- Sự sai lệch nhỏ của bộ giao động nội của M Okvip1 store cũng dẫn đến hạn chế về độ chính xác của phép đo FDOA.
- Rất khó để đánh giá xem liệu các tín hiệu lan truyền qua M Okvip1 store lân cận sẽ được phát hiện hay không. Tức là SNR (Signal to noise ratio) sẽ phải đủ lớn để đánh giá tín hiệu.
3. Độ chính xác của xác định vị trí nguồn nhiễu
Xác định các nguồn lỗi liên quan đến phép đo TDOA/FDOA được đưa ra ở bảng dưới.
|
Các nguồn lỗi của phép đo TDOA
|
Các nguồn lỗi của phép đo FDOA
|
- Độ trễ về thời gian
- Nhiễu nhiệt
- Nhiễu tầng điện ly
- Sai số vị trí quỹ đạo
|
- Nhiễu nhiệt
- Bộ dao động M Okvip1 store
- Nhiễu tầng điện ly
- Lỗi tốc độ quỹ đạo
- Lỗi vị trí quỹ đạo
|
Lỗi RMS được tính toán cùng với các nguồn lỗi như trên và phải chuyển đổi sang lỗi vị trí địa lý RMS. Thông thường, kết quả kết hợp của hai phép đo sẽ là một hình elip trên bề mặt của trái đất cùng với vị trí của nguồn nhiễu nằm trong hình elip.
Thông thường, các lỗi TDOA giao động từ 10 đến 20ns. Những lỗi này là không đáng kể so với các lỗi vị trí địa lý do các phép đo Okvip88 - liên minh giải trí. Các lỗi vị trí địa lý do các lỗi trong phép đo FDOA nhiều hơn so với lỗi TDOA.
Các lỗi lớn trong FDOA chủ yếu được gây ra bởi sự hạn chế về độ chính xác thông tin thiên văn M Okvip1 store, để hạn chế ít lỗi nhất nếu những thông tin về thiên văn M Okvip1 store và dự báo vận tốc của M Okvip1 store được xử lý chính xác.
4. Các yêu cầu và kiến trúc hệ thống
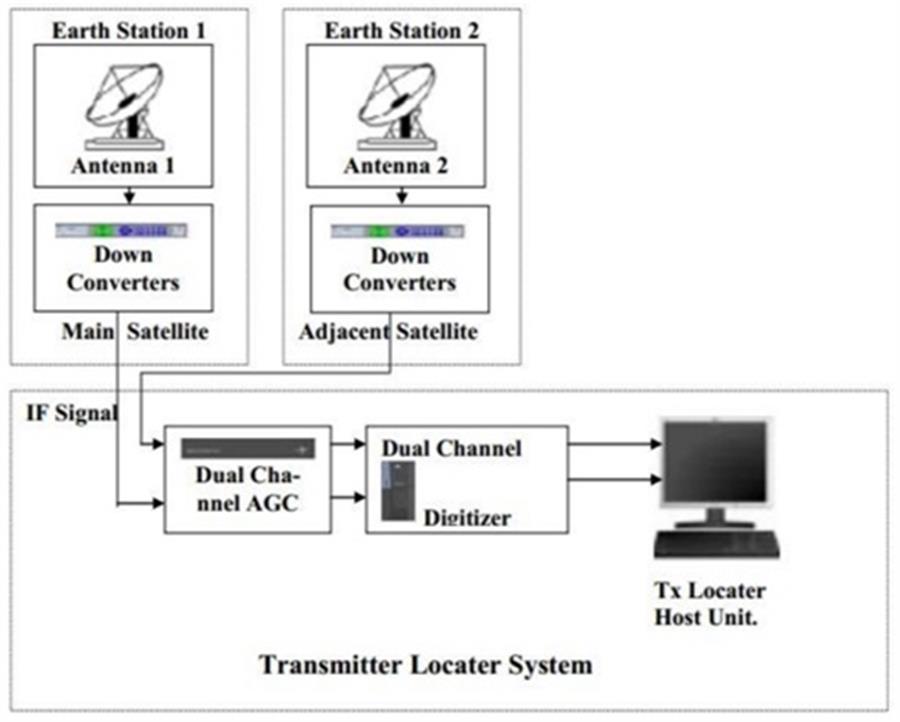
Hình 4: Cấu trúc hệ thống sử dụng phương pháp TDOA/FDOA
Hệ thống bao gồm 3 khối chính:
- Khối AGC: Chức năng của khối AGC là cung cấp điều khiển độ lợi tự động để duy trì các yếu tố đầu vào ADC tại điện áp tối ưu.
- Bộ số hóa kênh đôi: Đồng bộ số hóa được thực hiện bằng cách sử dụng một số hóa hai kênh duy nhất được cài đặt trực tiếp hoặc giao tiếp với máy tính cá nhân để thu thập dữ liệu có sẵn để xử lý.
- Khối chính: Bao gồm phần mềm hệ thống và giao diện người sử dụng, khối chính được kết nối tới bộ số hóa thông qua giao diện kết nối PCX/PXI hoặc USB.Ngoài ra hệ thống bao gồm hai trạm trái đất gồm Anten, bộ LNA, bộ Down converter, máy phân tích phổ để phân tích tín hiệu và xác định nguyên nhân gây nhiễu và các phần mềm liên quan như phần mềm tính toán CAF, phần mềm giải quyết các phương trình hyperbolic, Phần mềm để thu thập các tín hiệu và điều khiển số hóa và lưu trữ dữ liệu, phần mềm giảm lỗi định hướng TDOA/FDOA, phần mềm ưbản đồ số.
5. Tài liệu tham khảo
- Handbook of position location (Theory, practice and advances) – IEEE;
- Geolocation using TDOA and FDOA measurement - Darko Muˇ sicki and Wolfgang Koch;
- Geolocation of communications satellite interference - Howard Grant, Eric Salt and David Dodds.